
文字サイズ 

Last Updated:
(加速器に関する論文検索サイト)
運転中の加速器

過去に運転していた加速器
加速器理論
研究活動アーカイブス
SuperKEKB主リング“回る”六極電磁石試験開始
現在KEKではKEKBで記録した21.08/nb/sという世界最高ピークルミノシティを更に40倍もアップさせるSuperKEKBの建設作業が進められています。SuperKEKBではルミノシティを上げるためにKEKBに比べてより小さなビームをより大強度で周回させて衝突させることを目指します。
実際に加速器運転が始まるとビームの性能、ルミノシティを上げていくために様々な加速器パラメタの調整を行います。この調整用の道具のひとつが、今回紹介する“回る”六極電磁石です。イメージとしては観覧車、ですが、さすがに360度もくるくると回り続ける、という訳ではありません。回転させるのは図1にあるような六極電磁石で、六極電磁石の特性上初期設置位置の水平状態から±30度回すことが出来ればビーム運転に必要な調整量をカバーすることが出来るというものです。そこで、今回は水平から±30度の範囲で滑らかに回転し目標値でピタリと止まることが出来るような回転機構を設計・製作しました。
SuperKEKBで必要な回転機構付き六極電磁石は計24台でこれらは全て陽電子リングに設置されます。陽電子リングには特殊なタイプの六極電磁石を除くと100台の六極電磁石があるので、このうちの約四分の一にあたる24台が“回る”電磁石になるわけです。この回転六極システムの特長は(1)コスト削減の為にKEKBで使った六極電磁石を改造し再利用する、(2)回転角度設定精度は0.1 mrad、(3)回転しても磁石の中心はぶれない(0.1mm程度に抑える)の3つです。因みに “mrad”はミリラジアンという単位で約0.057度にあたります。
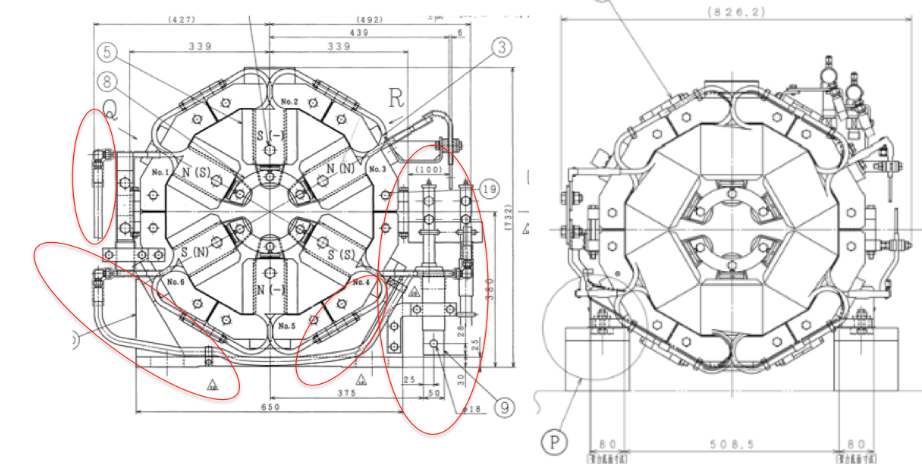
回す六極電磁石は磁石本体だけでも約700kgあり、決して小さなものではありません。また元々の電磁石では電源ケーブルの端子台や冷却水配管などが図1にあるように水平方向に出っ張っています。まず回転時に邪魔にならないよう、そして回転機構が隣のビームラインにある電磁石等と干渉しないよう、これらの出っ張りを極力小さくするように電磁石本体、主に電源ケーブルや冷却水配管回りの改造を行いました。
|
| 図1:六極電磁石断面図(左:改造前、右:改造後)。赤で囲んだ出っ張り部分を改造してよりコンパクトな断面形状へ改造した。 |
回転機構については700kgの荷重を滑らかに回転させるのに充分なパワーのあるモーターとギアを選定し、ギアの位置や電磁石の回転機構への組付けの部分を工夫することでなるべく全体がコンパクトになるようにしました。図2は電磁石を回転させるためのギアと製作途中の回転機構です。
 |
| 図2:回転ギア(左)とギアがついた回転機構(右)。 |
次に改造した六極電磁石を回転機構に組み付ける作業を行い回転中心位置ぶれが小さくなるように組付け部の微調整を行いました。微調整作業は、(1)電磁石の合わせ面(この六極電磁石は60度分、つまり一磁極分ずつ全体が6つに分割されています)に細いワイヤを張る、(2)3本のワイヤがクロスする部分(ヘアクロス)を電磁石中心とみなし初期の水平位置、即ち0度から±30度回転させた時の中心位置のずれを光学機器(トランジット)で測量する、(3)電磁石と回転機構の位置関係をボルトで調整する、必要に応じて(2)と(3)を繰り返し行う、というものです。図3にこれら一連の微調整作業の様子を示します。

|
| 図3:左から、組付け作業、回転中心微調整作業、六極電磁石に張ったワイヤ。 |
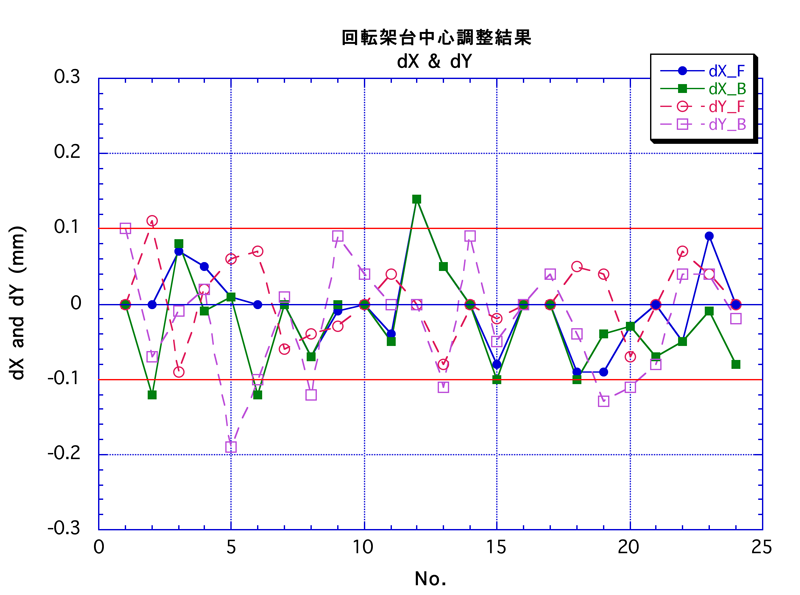
図4は微調整後の回転中心の水平方向と垂直方向のずれを各六極電磁石についてプロットしたものです。横軸は電磁石の番号で1から24まであります。各測定は電磁石の手前側と奥側の2箇所で行いました。回転ぶれが目標値の0.1mm以内にほぼ収まっていることがわかります。
|
| 図4:回転中心からの電磁石中心の狂い。dX_FおよびdX_Bはそれぞれ測定者から近い方および遠い方の水平方向のズレ、dY_FおよびdY_Bは同様の垂直方向のズレを示す。 目標の±0.1 mm領域は赤線で示されている。 |
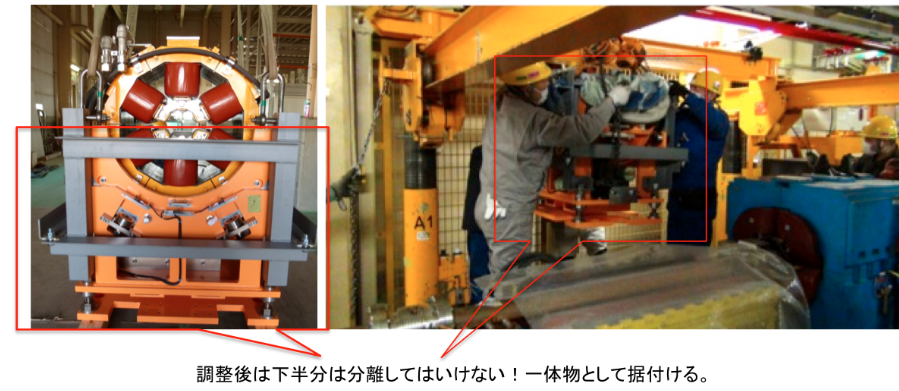
次にSuperKEKBトンネル内への搬入、ビームラインへの据付け作業となりますが、一つやっかいなことがありました。通常電磁石の搬入は電磁石部分と架台部分を分離して別々に行います。この方が作業が容易になるからです。但し、今回の回転機構付き六極電磁石についてはもうすでに電磁石と回転機構(つまり架台)部分の取り合いを回転中心がぶれないように微調整してしまってあるので搬入時に再分離する訳には行きません。また通常の搬入作業のように電磁石に吊り環をつけて全体を吊ってしまうと電磁石が回転機構から浮いてしまい着地した時に回転機構との取り合いがずれてしまう可能性があります。そこで、まず特別な籠のような治具を作り電磁石と回転機構を下から丸ごと吊るようにしました。ビームラインへの据付け時にも電磁石と回転機構の取り合い部分が離れないように注意しました(図5)。この吊り籠は電磁石設置後現場で解体するので電磁石本体と回転機構の間に余計な力がかかることなくビームラインに設置することが出来ました。
|
| 図5:吊り籠(左)とビームラインへの設置作業の様子(右)。 |
さて、この電磁石、単体でくるくる回す訳ではありません。実際には電力ケーブルや冷却水配管が電磁石本体につながります。最大で425Aも流す電力ケーブルはケーブルというよりは剛体に近い感じのものです。最後の難関は電力と水の供給ラインとの接続でした。どうやったら滑らかな回転を妨げないような接続が出来るか?今回私達は、素線が細くて編み込み方も特別な電線と、フレキシブルホースを採用しました。通常の電力ケーブルと冷却水配管を中継盤で受けて力が直接回転機構にかからないようにして、中継盤と回転機構の間はこれらの柔らかい特殊ケーブルとホースで繋ぎました。極力回転機構に力が加わらないように繋ぐという考え方です(図6)。

|
| 図6:電力ケーブル、冷却水配管接続の様子。 |
先日、システムチェックとして初めて地上部の制御棟から信号を送り、実際にケーブル類を繋ぎ込んで±30度回転させる試験を行いました。
実際の回転角度は高精度傾斜計を使ってモニターしています。この試験で、地上部から約200m先にある回転機構の制御及び高精度傾斜計からのモニター値の読み返しが出来ることを確認しました。また、このモニター値が設定値になるように回転角度を微調整するフィードバック制御により目標値に0.1mradの精度で設定できることを確認しました。また、電力と冷却水の接続案についても、ケーブル余長の最適化などは今後の課題となりましたが、概ね問題がないことを確認しました(実際には今回の試験で使用したものよりもう少し柔らかいフレキシブルホースを使います)。今後残りの電磁石の電力・冷却水供給ラインへの接続を行い、24台全ての回転制御を中央計算機から一括で行えるよう制御グループの協力のもと制御システムの構築を進めて行く予定です。
〜 記事提供 : 加速器第四研究系 増澤 美佳 氏 〜
| このページは加速器研究施設で更新作業をしております。ご質問などがあれば下記アドレスにご連絡下さい。 Copyright(c) 2009, HIGH ENERGY ACCELERATOR RESEARCH ORGANIZATION, KEK 〒305-0801 茨城県つくば市大穂1-1 |
|web-acc |