Robotics
PF Automated Mounting system (PAM)
- 1st robot

The 1st robot was installed to the BL-5A at the same time as the installation to the AR-NW12A. Test of the double-tongs system II was carried out with this robot. Then the double-tongs II has been moved to the BL-17A robot and the double-tongs III was installed on this robot. - 2nd robot
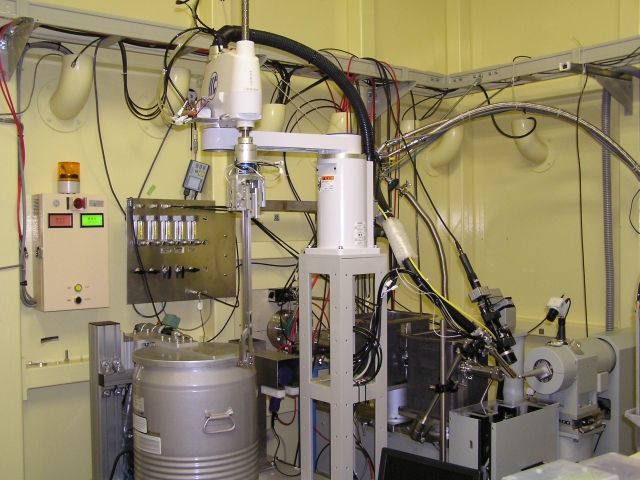
2nd robot was installed to the AR-NW12A at the same time as the installation to the BL-5A. Then this robot was moved to the AR-NW-Robotics development room to test the 3rd robot at the NW12A. This robot is now being used for the development of software and the test of hardware. - 3rd robot

The 3rd robot was developed for R&D in 2006. However, this robot is now working at the AR-NW12A with the double-tongs III. - 4th robot

This robot is developed for the BL-17A in 2007. Basic design of this robot is same as the 3rd robot. At the same time, we developed the double-tongs II, tested it at the BL-5A and then moved it to the BL-17A. - 5th robot

This robot was delivered on January 16, 2009. The design of this robot is based on the 4th robot and the double-tongs III was installed. We checked it and we are installing it in the experimental hutch of AR-NE3A.
Sample cassette
- Cassette

Our robots can deal with the SSRL cassette. 96 pins are kept in one cassette. - Inside Dewar without LN2
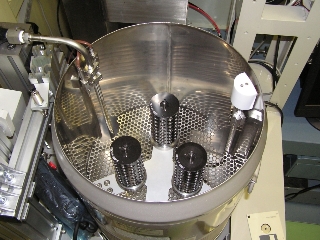
The robot Dewar can keep 3 cassettes.